Announcing iceoryx2 v0.4.0
Christian Eltzschig - 28/09/2024

What Is iceoryx2
iceoryx2 is a service-based inter-process communication (IPC) library designed to make communication between processes as fast as possible - like Unix domain sockets or message queues, but orders of magnitude faster and easier to use. It also comes with advanced features such as circular buffers, history, event notifications, publish-subscribe messaging, and a decentralized architecture with no need for a broker.
Release v0.4.0
With today's iceoryx2 v0.4.0 release, we've achieved many of our milestones and are now close to feature parity with its predecessor, the trusty old iceoryx.
If you're wondering why you should choose iceoryx2 over iceoryx, here are some of its next-gen features:
- No more need for a central daemon like RouDi.
- It's up to 10 times faster thanks to a new, more efficient architecture.
- More dynamic than ever—no more compile-time memory pool configuration.
- Advanced Quality of Service (QoS) settings.
- Extremely modular: every aspect of iceoryx2 can be customized, allowing future support for GPUs, FPGAs, and more.
- Completely decentralized and even more robust.
- A restructured API and resource management system that enables a zero-trust policy for true zero-copy communication in the future.
- Language bindings for C and C++ with CMake and Bazel support right out of the box. Python and other languages are coming soon.
- Upcoming gateways to enable network communication via protocols like zenoh, DDS, MQTT, and more.
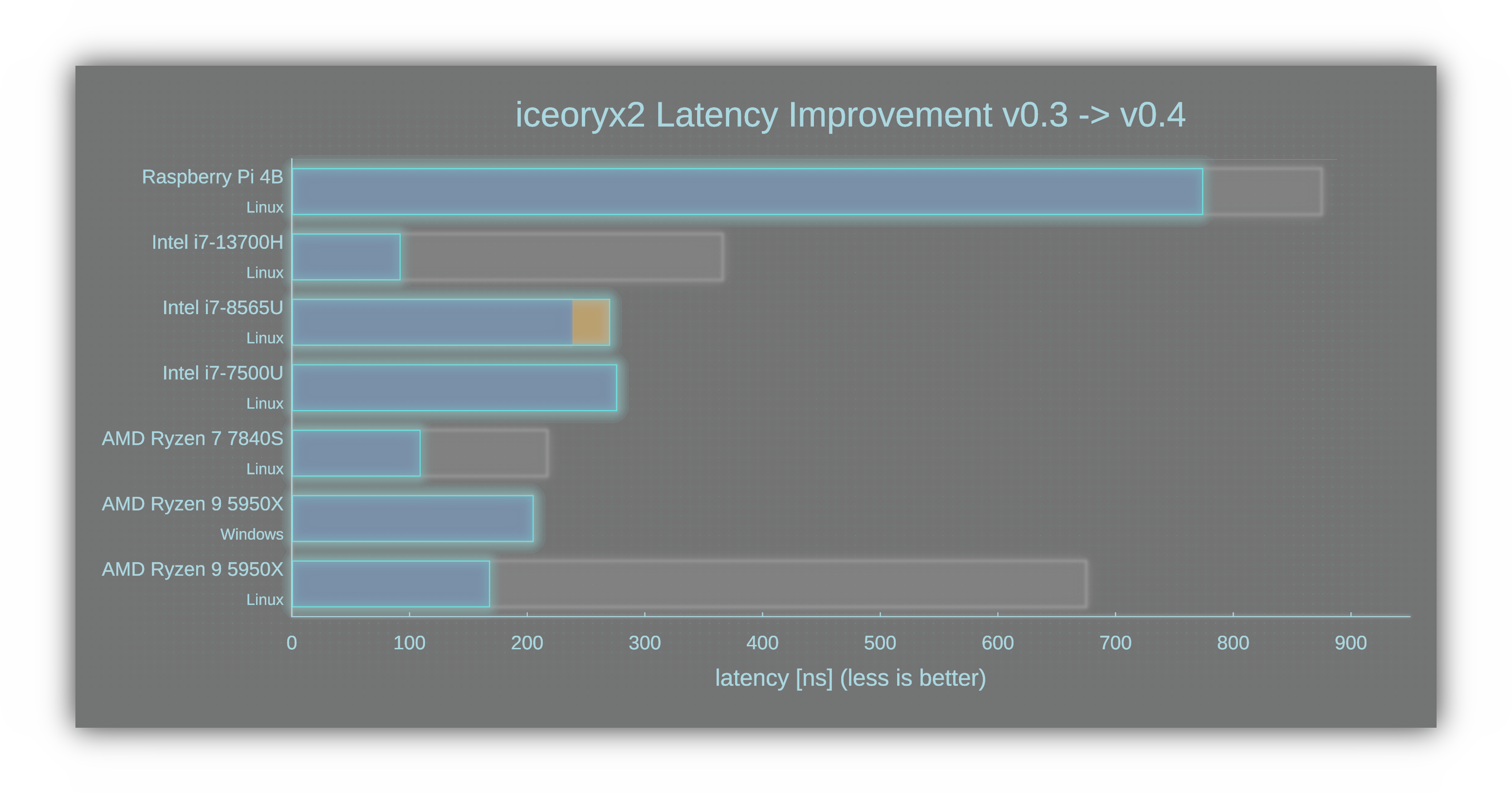
With this new release, we're faster than ever. On some platforms, latency is even under 100ns! Be sure to check out our iceoryx2 benchmarks and try them out on your platform.
Highlights
Here are some of the feature highlights in v0.4.0:
- C and C++ language bindings: We've added a range of new
examples
to help you get started with the supported languages.
- Plus, there's a shiny new website: https://iceoryx2.readthedocs.io, where we're building a detailed introduction to inter-process communication, true zero-copy, and iceoryx2. Whether you're just getting started or looking to fine-tune every feature to your needs, it's all in one place.
- New build systems: C and C++ bindings come with support for:
- Bazel & CMake
- colcon: We're working on
iceoryx2_rmw, which will be unveiled at ROSCon 2024 during Mathias' talk: "iceoryx2: A Journey to Becoming a First-Class RMW Alternative."
- iceoryx2 nodes: Nodes are the central entity handling all process-local resources, such as ports, and are key to monitoring other processes and nodes. If a process crashes, the others will clean up resources as soon as the issue is detected.
- Command-line debugging and introspection: Meet iox2. If you want to see which services or nodes are running—or if you're curious about the details of a service or process—this is your go-to tool.
- Runtime-sized services: We've overcome the compile-time memory configuration limitation of iceoryx1. If you want to send a dynamic-sized typed array (like a Rust slice), you can set up the service and publisher with a runtime worst-case size. If that's insufficient, you can create a new publisher with a larger array size.
- Advanced service and port configurations: For specialized use cases, like SIMD or FPGA, you can define custom alignments for your service's payload.
- User-defined service attributes: You can now set custom key-value pairs to tag services with additional properties. Check out the iceoryx2 Deep Dive - Service Attributes for more details.
- iceoryx2 Domains: Separate multiple processes into domains, ensuring they don't interfere with one another.
- Custom User Header: There's an interface for defining a custom header that is sent with every sample.
- 32-bit support: iceoryx2 now runs on 32-bit machines, and long-term, we aim to support mixed-mode zero-copy communication between 32-bit and 64-bit processes.
- Placement new for iceoryx2-bb-containers: Since iceoryx2 can handle gigabytes of data, we provide a mechanism to loan memory and perform in-place initialization—something akin to C++'s placement new.
Sneak Peak: Mission Control
Our upcoming Mission Control Center will provide deep introspection and debugging for your iceoryx2 system. You’ll be able to monitor the CPU, memory, and I/O load of every process. You can also view the frequency and content of message samples, inspect individual nodes with their running services, and visualize how nodes and services are connected—all in real time.

What’s Next?
Check out our Roadmap.
In the next release, we plan to focus on:
- Finalizing the C/C++ language bindings: Most of the Rust functionality works, but features like dynamic slice support and service attributes are still in progress.
- Event multiplexing: We’re extending
Node::wait()for more streamlined event handling.- This will come with advanced integrated events, such as push notifications for system events like process crashes or service changes.
- Expect detailed examples and documentation.
- Services with dynamic payloads: You won’t need to define a fixed payload size for services with slices anymore. We’ll introduce an allocation algorithm that acquires more shared memory as needed, and it’ll be customizable.
- Health monitoring: With iceoryx2 nodes, we can detect dead nodes and clean up their resources. The next step is to actively notify processes when a sender or receiver dies.
- Expanded documentation: Inter-process communication can be complex, so we’re working on extending the docs to provide a gentle introduction, explain iceoryx2's features in detail, and offer a step-by-step tutorial on making the most of it.